Invert Robotics entwickelte eine speziell angepasste Kletterroboter- Inspektionsplattform für den Erhalt von 3D-Scandaten ohne die Notwendigkeit des risikoreichen Zugangs zum beengten Raum unter einer 250 000 Tonnen schweren Eisenerzhalde.
Invert Robotics wurde für dieses Projekt gefragt, nachdem die beiden Unternehmen eine andere gemeinsame Inspektion erfolgreich durchgeführt hatten. Invert Robotics entwickelte eine Methode zum Überqueren eines geriffelten Förderbands mit unserem Kletterroboter und erweiterte das System um einen Faro-Focus-3D- Scanner.
Ziel war es, entlang eines tiefen, geriffelten Stahlförderbands Zugang zu einer großen Schüttgutrutsche mit Eisenerz zu erlangen und 3D-Bilder und Laserscandaten zu erhalten. Herkömmlicherweise wäre diese Arbeit händisch mit einem Gerüst ausgeführt worden, was mit großer Gefahr durch herabfallendes Eisenerz und mit Risiken verbunden ist, die mit dem Betreten beengter Räume einhergehen.
Um die Gefahr herabfallender Stücke zu minimieren, müsste das Erz erst unter Einsatz schwerer Maschinen geräumt werden. Das ist äußerst zeitaufwändig und bei Einkommensverlusten von bis zu 1 Million AUD pro Stunde sind Zeitverzögerungen nicht wünschenswert.
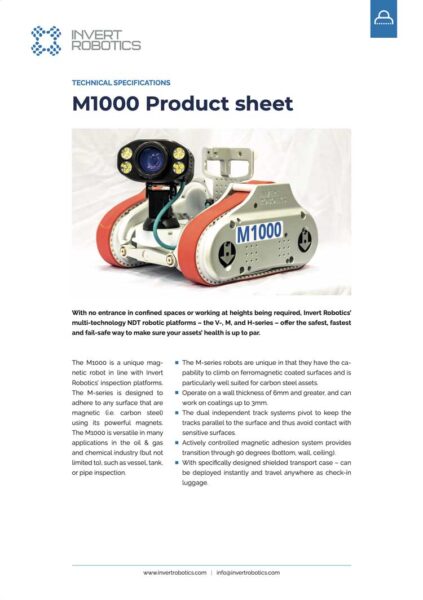
Das Rapid-Response-Team von Invert Robotics entwickelte einen Kletterroboter mit integrierten Auslegern, um die Stabilität während des Überquerens des geriffelten Förderbands zu gewährleisten. Und ein Montagesystem zur Befestigung des 3D-Scanners.
Innerhalb eines Monats war der erste Prototyp einsatzbereit und konnten die ersten Tests durchgeführt werden. Nach Fertigstellung des ersten Prototyps waren nur noch geringfügige Anpassungen notwendig. Ein Team, zusammengesetzt aus Mitarbeitern beider Unternehmen, erstellte erfolgreich einen 3D-Scan des Behälters und erlangte damit wertvolle Daten bezüglich des Anlagenzustands.
Diese Daten werden mit den vorigen Scandaten verglichen, die bei der Installation des Behälters aufgezeichnet wurden.