Invert Robotics developed a bespoke crawler inspection platform to obtain 3D scan data without entering the high risk confined space area below a 250,000 tonne iron ore stockpile.
After a previous collaborative inspection with Invert Robotics, this mine in Western Australia once more called on us. This time they challenged us to devise a method to not only traverse a ribbed conveyor belt with our crawler platform, but also integrate a Faro Focus 3D scanner onto the robot.
The objective was to gain access to a large iron ore chute, along a deep ribbed steel conveyor belt and then obtain 3D imagery and laser scan data.
Traditionally this job would have been performed manually with scaffolding, creating a serious crush hazard from falling iron ore, as well as confined space entry risk. To minimise the crush hazard, the stockpile would need to be levelled with heavy machinery: a very time-consuming exercise, with lost income potentially above $1 million AUD per hour.
Bespoke solution
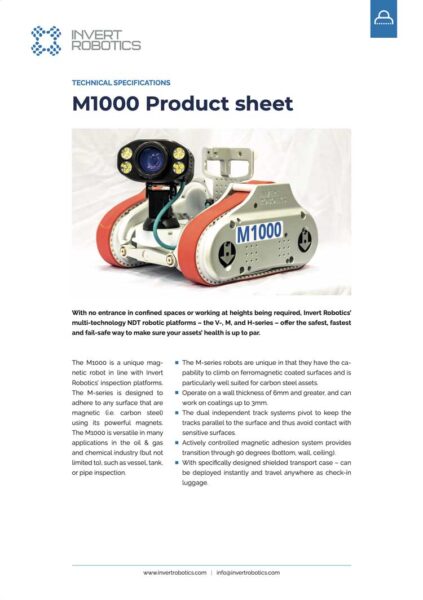
Invert Robotics’ rapid response team designed a crawler system with integrated outriggers to maintain stability while traversing the ribbed conveyor, and a mounting system to support the 3D scanner.
Within one month the first prototype was finished and first tests performed.
A successful 3D scan of the vessel was then completed by a team with staff from both companies. Valuable asset condition monitoring data was captured in this way. This data will be compared to previous baseline scan data obtained when the vessel was installed.
As no entry to a high-risk zone or confined space by a person was required during this job, significant safety improvements were made, as well as maximising potential revenue.